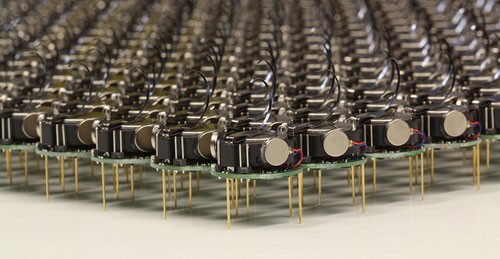
Recientemente se ha desarrollado una metodologia para fabricar cientos – o quiza miles— de minusculos robots para realizar tareas especificas en grupo sin utilizar memoria o procesamiento de computo.
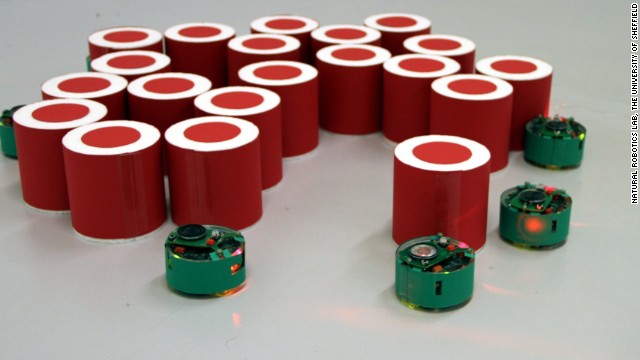
En efecto, un equipo de ingenieros de la Universidad Sheffield, ubicada en Inglaterra, ha manufacturado y programado robots extremadamente simples que son capaces de formar grupos compactos sin necesitar un sistema de computo complejo, en una forma similar a un enjambre de abejas o una parvada de pajaros que son capaces de llevar a cabo tareas colectivamente.
Esta noticia fue captada por una colega y enviada para compartirla con nosotros. Nuestra colega indica que el resultado de tal investigacion fue publicado el pasado 17 de abril en el ‘International Journal of Robotics Research’, facilitando y preparando el camino para utilizar ‘enjambres’ de robots cuya aplicación tiene un potencial enorme. Por ejemplo, en la industria agropecuaria frecuentemente se requiere realizar metodos de cultivo de precision donde se podrian utilizar un gran numero de robots muy simples y baratos.


Analicemos con mayor detalle esta informacion…
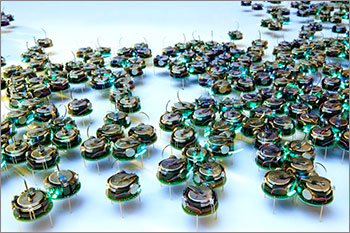
Los investigadores en cuestion han programado un grupo de 40 robots para realizar tareas grupales y han demostrado, utilizando simulacion computarizada, que este esquema puede ser expandido para incluir miles de robots.

Cada robot usa solo un sensor que le dice si si o si no pueden ‘ver’ otro robot frente a ellos. Basandose en si pueden o no ver a otro robot, ellos rotaran en ese momento, o se moveran en las cercanias en un circulo hasta que puedan ver a uno.
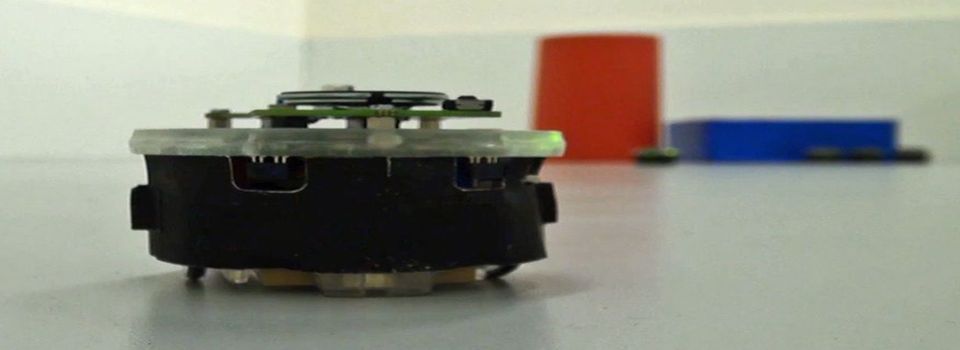
De esta manera ellos son capaces de formar y mantener gradualmente una formacion de grupo. Lo ingenioso del sistema recae en su simplicidad. Los robots no tienen memoria, no tiene que hacer calculos y requieren solamente muy poco informacion sobre el entorno
¿Quiere ver actuar a un grupo de enjambres de robots? Helos aqui:
Liga: https://www.youtube.com/watch?v=LO9JxFLgh94&feature=youtu.be
Hasta ahora lo enjambres roboticos habian requerido una programacion muy compleja, lo cual implicaba una dificultad extrema para miniaturizar a los robots individuales. Con la programacion desarrollada por el equipo de la Universidad Sheffield, sin embargo, va ser posible desarrollar maquinas extremadamente pequenas –incluso a nivel de escala nano.
El sistema de Sheffield tambien nos asegura que aun si la informacion percibida por los robots se corrompiera parcialmente, la mayoria de ellos seran capaces de seguir trabajando juntos sin problema para completar las tareas que se les encomiende.

Roderich Gross, del SCentRo, explica: ‘Lo que hemos demostrado es que los robots no necesitan hacer grandes procesos de computo para resolver problemas como el de agruparse en un solo cluster; lo mismo se puede observar en las conductas de enjambres, cardumenes o manadas que observan bacterias, pescados, o mamiferos en la naturaleza.’
‘Esto significa que estamos en posibilidades de ‘escalar’ estos enjambres, para usar miles de robots que pueden ser programados para realizar tareas especificas. En un escenario del mundo real, esto nos puede dar la posibilidad, por ejemplo, de monitorear los niveles de contaminacion en el ambiente; tambien podriamos utilizarlos para realizar tareas en areas donde resulte peligroso para los humanos. Por el hecho de que son tan simples, estamos seguros que estos robots tambien pueden ser utilizados a escala nano, por ejemplo, en aplicaciones para tecnologias de atencion medica, podrian viajar a traves del sistema vascular humano para ofrecer diagnosticos o tratamientos en una forma no invasiva.’
Los investigadores estan ahora enfocados en programar robots para realizar tareas simples donde tienen que interaccionar con otros objetos, por ejemplo moverlos u ordenarlos en grupos.
Fuentes:
http://www.sciencedaily.com/releases/2014/04/140416225324.htm
https://www.sheffield.ac.uk/news/nr/sheffield-centre-robotics-gross-natural-robotics-lab-1.265434
http://www.swarm-bot.org/index.php?main=3&sub=224&conpage=stoy
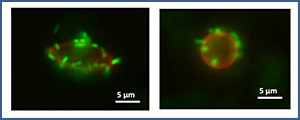
http://noticiasdelaciencia.es/not/3053/la_asombrosa_eficiencia_de_la_conducta_colectiva_en_grupos_de_bacterias___una_nueva_perspectiva_para_el_diseno_de_inteligencia_artificial_/
_____________
Agradezco las contribuciones y opiniones enviadas.
No. de ingenieros en la lista de distribucion: 730
No. de envio: 195
Bienvenidos comentarios sobre los envios.
Nota: Este correo no tiene acentos.
Deseando tengan un excelente fin de semana, les envio un fuerte abrazo.
Arnoldo
_____________
Comentarios sobre el envio 193: Lluvia Solida....
_____________
El 11/05/14 21:32, rancho santa lucia escribio:
Estimado Arnoldo, por diversas razones no pude comentar con oportunidad lo relativo a pruebas de la llamada LLuvia solida que Ismael efectuo en el rancho Santa Lucia, te envio esta serie de fotos de sus efectos en planta de Pistachero: en la primera se ve la raiz del testigo y el tratado no observandose entre ellas diferencia significativa,mas en las subsecuentes a simple vista se observa mejor desarrollo en las plantas tratadas que en los testigos siendo esto muy importante pues en el vivero esto permitira anticipacion en el proceso de injertación.
HGC




Para ver en detalle o mayor definición las diferencias por favor entre a la liga:https://onedrive.live.com/?cid=2D04B0C7F78B7C2D&id=2D04B0C7F78B7C2D!387&parId=2D04B0C7F78B7C2D!442&authkey=!AJRwRP3F7g_6wVM&v=3
Ismael y Horacio Gonzalez
(639) 107 9938, (639) 121 6680
CD. DELICIAS CHIHUAHUA MEXICO
www.pistachosantalucia.mex.tl
www.facebook.com/pistachero.santalucia
_____________
El 12/05/14 12:07, Enrique Dau escribio:
Arnoldo:
Te felicito por tu excelente trabajo que compartes tan generosamente. Te solicito los datos del Ing. Sergio Jesús Rico Velasco, para conocer mas de su lluvia solida.
Un saludo afectuoso.
Enrique Dau Flores
Consejería
General del
EjecutivoEl 12/05/14 12:07, Enrique Dau escribio:
Arnoldo:
Te felicito por tu excelente trabajo que compartes tan generosamente. Te solicito los datos del Ing. Sergio Jesús Rico Velasco, para conocer mas de su lluvia solida.
Un saludo afectuoso.
Enrique Dau Flores
Titular
Jesús García 2427 Piso 6
Col. Lomas de Guevara
Guadalajara, Jalisco 44657
_____________
El 15/05/14 08:58, Rene Bahena Figueroa escribio:
Estimados amigos.
Muy buenos dias desde la ciudad de Mexico, al final de este correo ustedes podran encontrar la direccion y los telefonos de la oficina del Ing. Sergio Rico, asi como mi tarjeta de presentacion soy el asistente personal del Ing. Rico, y estoy para servirles.
Quedo a la espera de sus comentarios, gracias.
_____________
Comentarios
sobre el envio
194: Material
Efimero....
_____________
El 10/05/14 10:47, Gerardo Reyes Salgado escribio:
Estimado Arnoldo,
primeramente un afectuoso saludo, ademas de agradecerte el envio del boletin.
Aprovecho para comentarte que a partir de abril ya no me encuentro en el IT de Cuautla y he regresado al CENIDET (aunque estoy por iniciar un periodo sabatico aqui mismo en Cuernavaca elaborando apuntes para la materia de Redes Neuronales Artificiales), por lo que te pido de favor que las siguientes publicaciones me las hagas llegar a mi nueve direccion.
Espero en algún momento poder saludarte personalmente y si en algo puedo apoyarte con mucho gusto.
Saludos cordiales
Dr. Gerardo Reyes Salgado
Enviado desde mi iPad
_____________
El 12/05/14 12:35, Oscar Luis Valle Molina escribio:
Estimado Arnoldo,
Debido a que me encuentro en proceso de retiro del IMP, agradecere me envies la subsecuente informacion a mi nueva direccion.
Atte.
Oscar Valle Molina
_____________
El 10/05/14 10:47, Gerardo Reyes Salgado escribio:
Estimado Arnoldo,
primeramente un afectuoso saludo, ademas de agradecerte el envio del boletin.
Aprovecho para comentarte que a partir de abril ya no me encuentro en el IT de Cuautla y he regresado al CENIDET (aunque estoy por iniciar un periodo sabatico aqui mismo en Cuernavaca elaborando apuntes para la materia de Redes Neuronales Artificiales), por lo que te pido de favor que las siguientes publicaciones me las hagas llegar a mi nueve direccion.
Espero en algún momento poder saludarte personalmente y si en algo puedo apoyarte con mucho gusto.
Saludos cordiales
Dr. Gerardo Reyes Salgado
Enviado desde mi iPad
_____________
El 12/05/14 12:35, Oscar Luis Valle Molina escribio:
Estimado Arnoldo,
Debido a que me encuentro en proceso de retiro del IMP, agradecere me envies la subsecuente informacion a mi nueva direccion.
Atte.
Oscar Valle Molina
_______________
Liga a blog Ex–Sheffield - 'Solo para ingenieros': (http://ex-sheffield.org/soloparaingenierosnet/)
Liga al Portal de la Academia Panamericana de Ingenieria - Ciencia y Tecnologia - 'Solo para ingenieros': http://www.academiapanamericanaingenieria.org/
Liga a: 'Ingenieria para todos' ('Planeadores', se publico en la Union de Morelos el lunes 12-05-14, pagina 32): http://www.launion.com.mx/servicios/hemeroteca/92-mayo-%E2%80%A2-2014/6877-12-mayo-2014.html
Liga a blog Ex–Sheffield - 'Solo para ingenieros': (http://ex-sheffield.org/soloparaingenierosnet/)
Liga al Portal de la Academia Panamericana de Ingenieria - Ciencia y Tecnologia - 'Solo para ingenieros':
Liga a: 'Ingenieria para todos' ('Planeadores', se publico en la Union de Morelos el lunes 12-05-14, pagina 32): http://www.launion.com.mx/servicios/hemeroteca/92-mayo-%E2%80%A2-2014/6877-12-mayo-2014.html